was manually polling my 3 MCP23017 expanders I need for all the buttons for my synth just to get the ball rolling. The serial monitor tells me it was taking almost 5ms….which is similar to the amount of time it’ll take for the dinosaurs to come back. (It’s a billion years in microcontroller land.) I thought making the jump to interrupts wouldn’t be that big of a deal. It was an absolute nightmare. I found a site that really got me going https://www.best-microcontroller-projects.com/mcp23017.html#L2415 , but they pulled a few tricks to account for some goofiness in the I2C’s interrupts. Within their tricks was a 1ms debounce delay. I’ve done my share of debouncing and I immediately did the ol’ nose scrunch to that one. A 1ms debounce is totally non-functional.
My problem was that after an interrupt was triggered on the MCP23017 (causing the 5V to drop to 0V), it was staying at 0V and not being reset. Using the Adafruit library, the method to do that was to simply read the getLastInterruptPinValue(); The problem was I was already doing this and the pin was not resetting back to 5V.
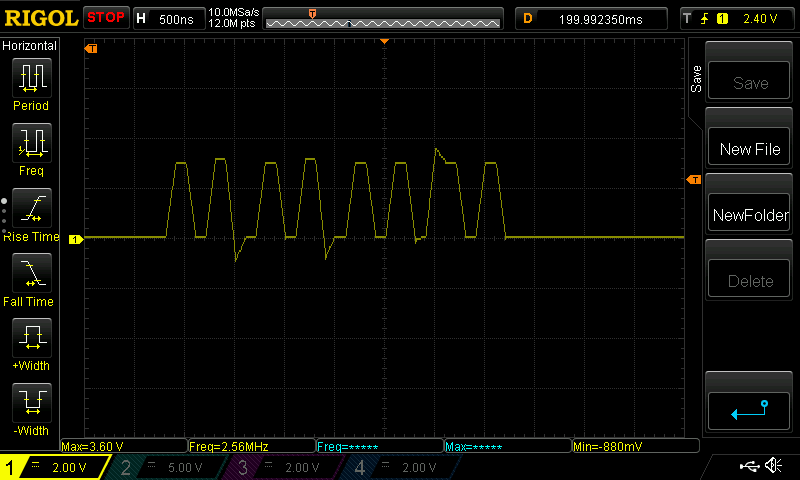
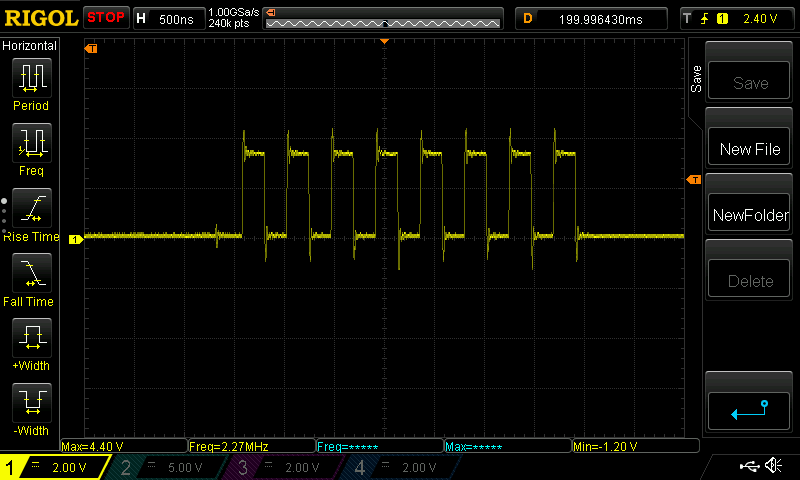
The solution came in realizing that the interrupts in the MCP23017 were continually being triggered by switch bounce. Nick Gammon, the king of everything, has an outstanding tutorial that illustrates this. He uses no oddball ISR stuff…..just meat n’ taters interrupts. However, he uses a 500ms debounce. That’s a hair extreme, but it sure beats 1ms. I was lucky in that I could wait to call the getLastInterruptPinValue() until I was done doing my work. In fact, I had no need for the value. All mine are zero. I was using that function call as an ISR reset. So, I could call getLastInterruptPin(), do my work, put a delay(150) just before the clearing function and everyone is happy.
Even better, I’m using the switches connected to my 3 MCP23017s to update a 16×2 LCD (among other things). I can update the LCD instantaneously. I don’t have to wait at all. In this way, the end-user will never feel my LCD being slow or clunky even though I have delays built-in. If I wanted to get really cute (and I may) and use an asynchronous delay like the infamous Arduino Blink Without Delay example. Actually, I’ll probably have to do that.
Anyway, here’s the code. I hope it helps.
#include "Arduino.h"
#include
#include
#define BUTTON1_INT_PIN PB8
#define BUTTON2_INT_PIN PB9
#define BUTTON3_INT_PIN PA15
#define MCP_INT_MIRROR true // Mirror inta to intb.
#define MCP_INT_ODR false // Open drain.
/********** NOTES ********************/
Adafruit_MCP23017 button1; // Create an object for the first button board.
Adafruit_MCP23017 button2; // Create an object for the second button board.
Adafruit_MCP23017 button3; // Create an object for the third button board.
volatile byte button1Apushed, button1A_ID_value, button2Apushed, button2A_ID_value, button3Apushed, button3A_ID_value;
volatile byte button1A_ID = 16; // reset to be out of the range of the 0-15 MCP23017 buttons.
volatile byte button2A_ID = 16; // reset to be out of the range of the 0-15 MCP23017 buttons.
volatile byte button3A_ID = 16; // reset to be out of the range of the 0-15 MCP23017 buttons.
// ------------- FUNCTIONS ---------------------------
void button1A_ISR()
{
button1Apushed = 1;
}
void button2A_ISR()
{
button2Apushed = 1;
}
void button3A_ISR()
{
button3Apushed = 1;
}
void setup()
{
//---------------- BUTTON EXPANDER SETUP ------------------------
// The address is specified using the A0, A1, and A2 pins
button1.begin(0b000); // use default address 0, otherwise, the address needs to be defined
button2.begin(0b001); // make sure to give A0 5V.
button3.begin(0b010); // Set this up.
pinMode(BUTTON1_INT_PIN, INPUT); // button1 interrupt pin on ucontroller
pinMode(BUTTON2_INT_PIN, INPUT); // button1 interrupt pin on ucontroller
pinMode(BUTTON3_INT_PIN, INPUT); // button1 interrupt pin on ucontroller
for (int i = 0; i < 16; i++)
{
button1.pinMode(i, INPUT); // MCP23017 #1 pins are set for inputs
button1.pullUp(i, HIGH); // turn on a 100K pullup internally
button2.pinMode(i, INPUT); // MCP23017 #2 pins are set for inputs
button2.pullUp(i, HIGH); // turn on a 100K pullup internally
button3.pinMode(i, INPUT); // MCP23017 #2 pins are set for inputs
button3.pullUp(i, HIGH); // turn on a 100K pullup internally
}
button1.setupInterrupts(MCP_INT_MIRROR, MCP_INT_ODR, LOW); // The mcp output interrupt pin.
button2.setupInterrupts(MCP_INT_MIRROR, MCP_INT_ODR, LOW); // The mcp output interrupt pin.
button3.setupInterrupts(MCP_INT_MIRROR, MCP_INT_ODR, LOW); // The mcp output interrupt pin.
// Setup INTs on the MCP23017 button1 for all 16 buttons
for (int i = 0; i < 16; i++)
{
button1.setupInterruptPin(i, FALLING);
button2.setupInterruptPin(i, FALLING);
button3.setupInterruptPin(i, FALLING);
}
button1.readGPIOAB();
button2.readGPIOAB();
button3.readGPIOAB();
attachInterrupt(digitalPinToInterrupt(BUTTON1_INT_PIN), button1A_ISR, FALLING);
attachInterrupt(digitalPinToInterrupt(BUTTON2_INT_PIN), button2A_ISR, FALLING);
attachInterrupt(digitalPinToInterrupt(BUTTON3_INT_PIN), button3A_ISR, FALLING);
} // end of setup
void loop()
{
if (button1Apushed) // Buttons 0-15 on MCP23017 #1
{
button1A_ID = button1.getLastInterruptPin();
// update LDC here
button1A_ID = 16; // reset to a value that is outside the 0-15 button range of the MCP23017
button1Apushed = 0; // reset the pushed status
delay(150); // strong debounce
button1A_ID_value = button1.getLastInterruptPinValue(); // This one resets the interrupt state as it reads from reg INTCAPA(B).
attachInterrupt(digitalPinToInterrupt(BUTTON1_INT_PIN), button1A_ISR, FALLING);
}
if (button2Apushed) // Buttons 16-31 on MCP23017 #2
{
button2A_ID = button2.getLastInterruptPin() + 16;
// update LDC here
button2A_ID = 16; // reset to a value that is outside the 0-15 button range of the MCP23017
button2Apushed = 0; // reset the pushed status
delay(150); // strong debounce
button2A_ID_value = button2.getLastInterruptPinValue(); // This one resets the interrupt state as it reads from reg INTCAPA(B).
attachInterrupt(digitalPinToInterrupt(BUTTON2_INT_PIN), button2A_ISR, FALLING);
}
if (button3Apushed) //Buttons 32-47 on MCP23017 #3
{
button3A_ID = button3.getLastInterruptPin() + 32;
// update LDC here
button3A_ID = 16; // reset to a value that is outside the 0-15 button range of the MCP23017
button3Apushed = 0; // reset the pushed status
delay(150); // strong debounce
button3A_ID_value = button3.getLastInterruptPinValue(); // This one resets the interrupt state as it reads from reg INTCAPA(B).
attachInterrupt(digitalPinToInterrupt(BUTTON3_INT_PIN), button3A_ISR, FALLING);
}
}